Equation of a plane in normal form
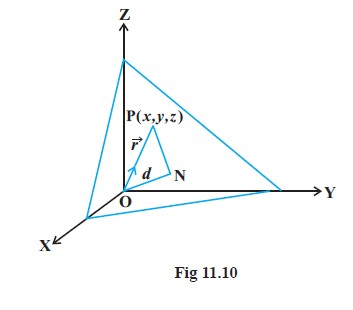
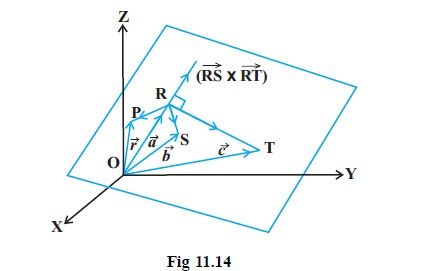
`=>` Consider a plane whose perpendicular distance from the origin is `d (d ≠ 0).` Fig.
`=>` If `bar (ON)` is the normal from the origin to the plane, and `hat n` is the unit normal vector along `bar (ON)` . Then `bar (ON) = d hat n`.
`=>` Let P be any point on the plane. Therefore,
`bar (NP)` is perpendicular to `bar (ON),` Therefore, `bar (ON) * bar (ON) = 0` ..........(1)
`=>` Let `vec r` be the position vector of the point P, then `bar (NP) = vec r -d hat n` (as `bar (ON) + bar (NP) = bar (OP)`)
Therefore, (1) becomes
` ( vec r - d hat n) * d hat n = 0`
or `( vec r - d hat n) * hat n =0` `( d ≠ 0)`
or `vec r * hat n - d hat n * hat n = 0`
i.e., `color{red}{vec r * hat n = d}` (as `hat n * hat n =1`) ..........(2)
This is the vector form of the equation of the plane.
`color{brown} "Cartesian form of the equation of the plane "`
`=>` Equation (2) gives the vector equation of a plane, where `hat n` is the unit vector normal to the plane. Let P(x, y, z) be any point on the plane. Then
`bar (OP) = vec r = x hat i + y hat j + z hat k`
`=>` Let `l, m, n` be the direction cosines of `hat n` . Then
`hat n = l hat i + m hat j + n hat k`
Therefore, (2) gives
`( x hat i + y hat j + z hat k) * (l hat i + m hat j + n hat k) =d`
i.e., `color{red}{lx+ my +nz = d}` .............(3)
`=>` This is the cartesian equation of the plane in the normal form.
`=>` If `bar (ON)` is the normal from the origin to the plane, and `hat n` is the unit normal vector along `bar (ON)` . Then `bar (ON) = d hat n`.
`=>` Let P be any point on the plane. Therefore,
`bar (NP)` is perpendicular to `bar (ON),` Therefore, `bar (ON) * bar (ON) = 0` ..........(1)
`=>` Let `vec r` be the position vector of the point P, then `bar (NP) = vec r -d hat n` (as `bar (ON) + bar (NP) = bar (OP)`)
Therefore, (1) becomes
` ( vec r - d hat n) * d hat n = 0`
or `( vec r - d hat n) * hat n =0` `( d ≠ 0)`
or `vec r * hat n - d hat n * hat n = 0`
i.e., `color{red}{vec r * hat n = d}` (as `hat n * hat n =1`) ..........(2)
This is the vector form of the equation of the plane.
`color{brown} "Cartesian form of the equation of the plane "`
`=>` Equation (2) gives the vector equation of a plane, where `hat n` is the unit vector normal to the plane. Let P(x, y, z) be any point on the plane. Then
`bar (OP) = vec r = x hat i + y hat j + z hat k`
`=>` Let `l, m, n` be the direction cosines of `hat n` . Then
`hat n = l hat i + m hat j + n hat k`
Therefore, (2) gives
`( x hat i + y hat j + z hat k) * (l hat i + m hat j + n hat k) =d`
i.e., `color{red}{lx+ my +nz = d}` .............(3)
`=>` This is the cartesian equation of the plane in the normal form.
`color{red} "Key Point "` - Equation (3) shows that if `vec r * (a hat i + b hat j + c hat k) = d` is the vector equation of a plane, then ax + by + cz = d is the Cartesian equation of the plane, where a, b and c are the direction ratios of the normal to the plane.